
Sun Shunwang (孙顺旺)
Hi there! 👋 I am currently an engineering student deeply passionate about 3D Spatial Perception and Embodied AI. Below is my academic journey:
- 🏫 Master’s Student, Zhejiang University
- Major: Mechanical Engineering
- Advised by Prof. Guodong Lu and Prof. Jituo Li
- Ranking: 1st (1/56, Score: 88.9/100)
- 🏛️ Visiting Student Researcher, HKUST (Guangzhou)
- Supervised by Prof. Renjing Xu
- 🎓 Bachelor’s Degree, Yanshan University
- Major: Robotics Engineering
- Ranking: 1st (1/29, Score: 89.2/100)
I am actively looking for Ph.D. and research intern opportunities for the Fall 2027 application cycle. If you have open positions, please feel free to send me an email (shunwang_sun@163.com).
🚀 Research Interests
- Embodied AI & World Models: Vision-Language-Action (VLA) models, Dynamic Tracking.
- 3D Spatial Perception: Monocular Visual Odometry (VO), Pose Estimation, 3D Reconstruction.
- Robotics & Edge AI: Full-stack robotic manipulation, Hardware-Software Co-design.
📝 Publications
Jituo Li (Supervisor), Shunwang Sun, Jialu Zhang, Xinqi Liu, Jinyao Hu, Zhicheng Lu, Sajad Saeedi, Guodong Lu
Accepted by IEEE Robotics and Automation Letters (RA-L)
arXiv / Code
Jituo Li (Supervisor), Shunwang Sun, Tingxi Xue, Xinqi Liu, Jialu Zhang, Huixu Dong, Guodong Lu
IEEE Transactions on Circuits and Systems for Video Technology (TCSVT), 2026
IEEE Xplore / pdf
[ arXiv Coming Soon ] / [ Code Coming Soon ]
💻 Projects
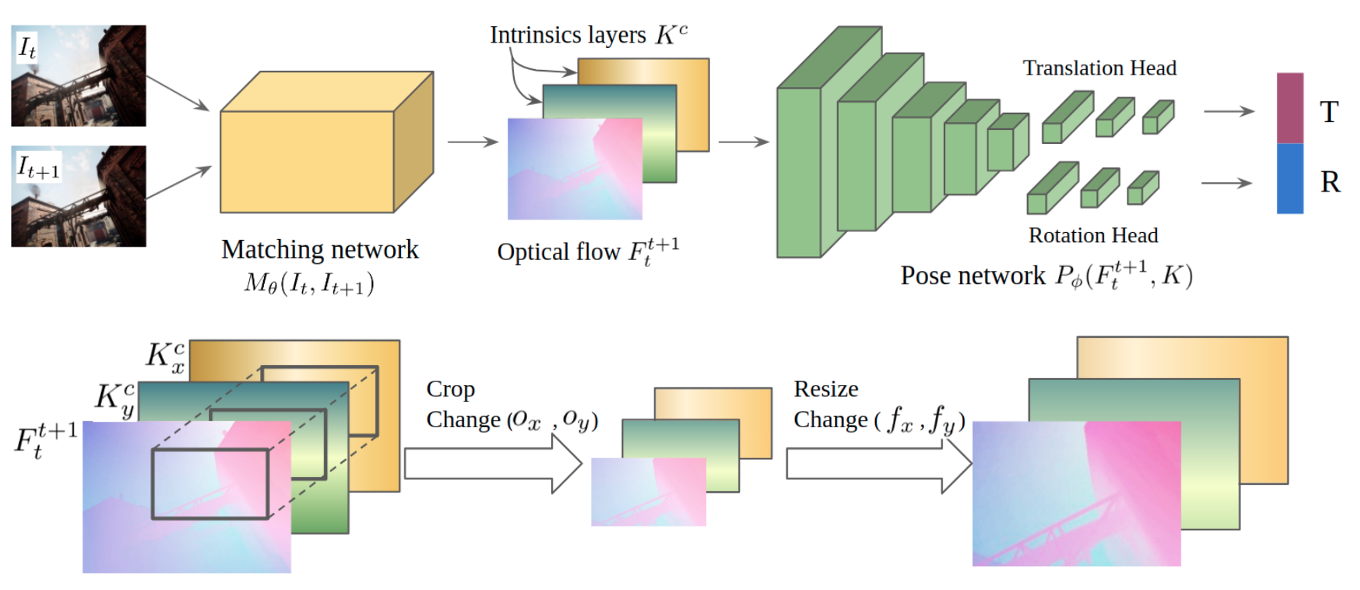
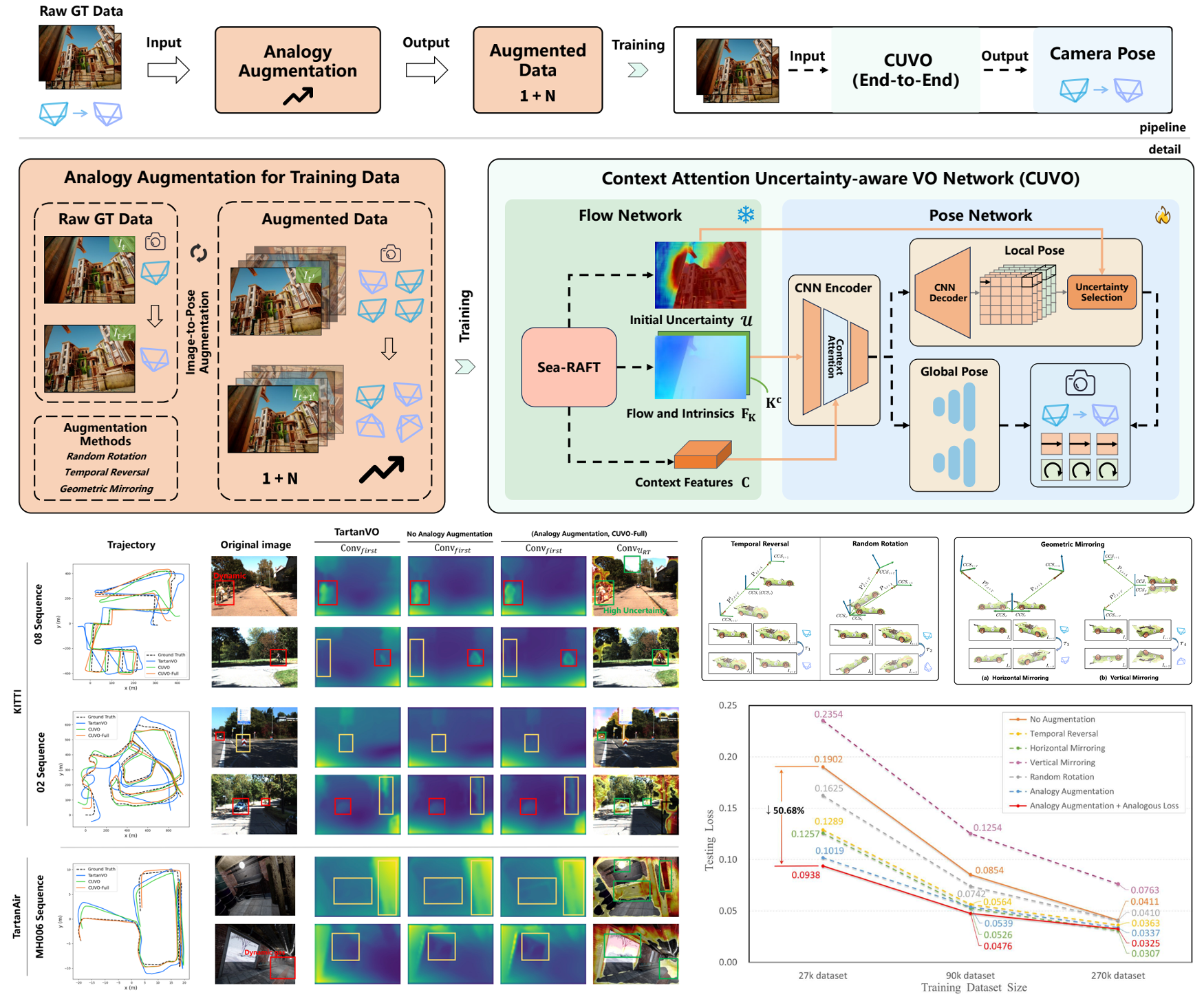
OpenTartanVO Framework
An open-source reproduction and optimization of the learning-based monocular visual odometry framework TartanVO. Supports multi-stage end-to-end training and testing. [GitHub]
FastTrackVLA: Dynamic Embodied Tracking
Designed a Vision-Language-Action tracking strategy combining VLM with Flow Matching for dynamic embodied environments. Achieved efficient trajectory denoising in just 3 iterations. (HKUST-GZ)
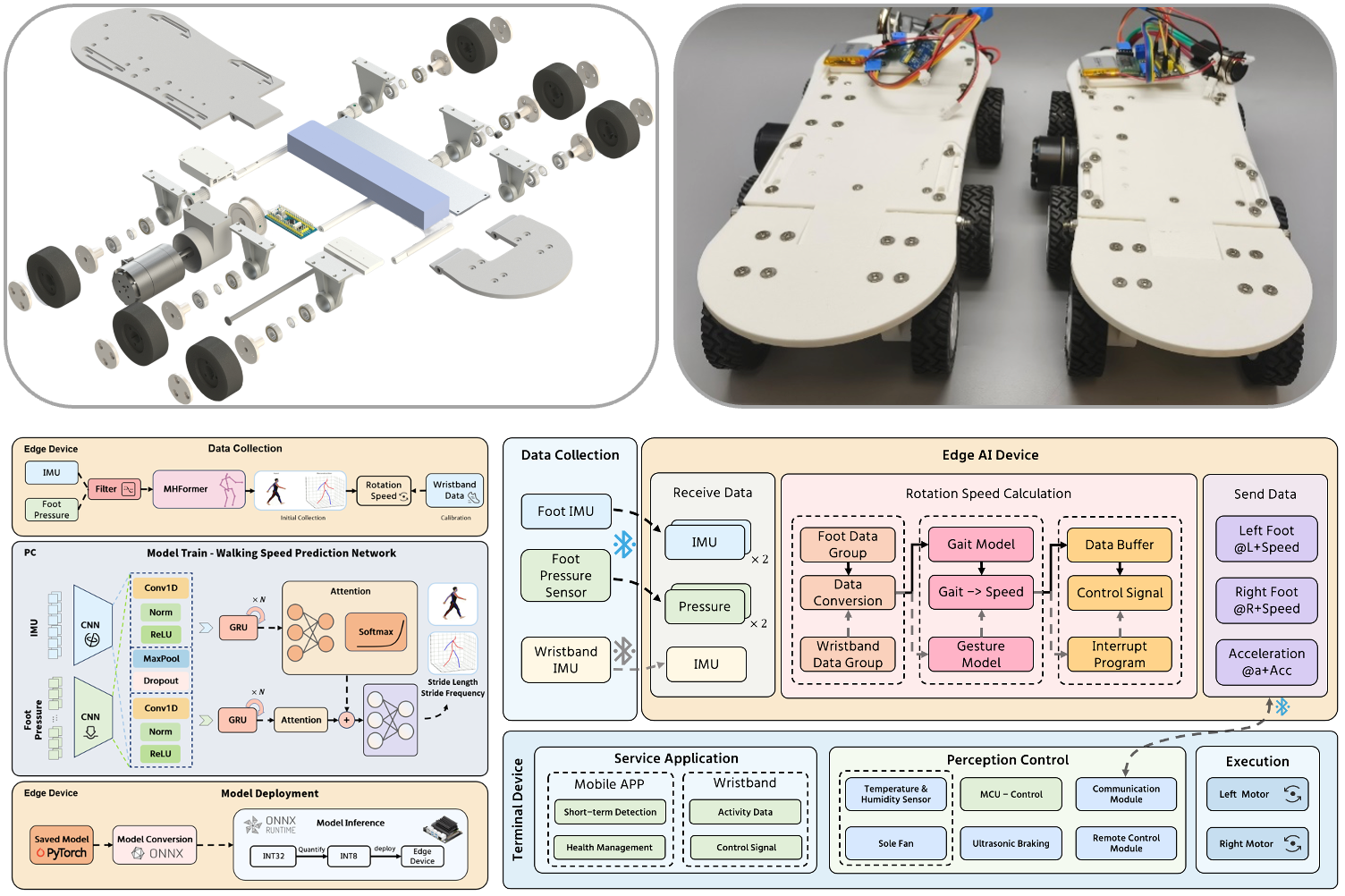
MarSurfer: Assisted Walking System
A smart 4WD footwear system addressing the commuter "last mile". Integrates multi-sensor fusion (pressure, IMU, ultrasonic) via STM32 and deploys dual neural networks on Jetson Nano for adaptive stride prediction (0.92ms latency). (Provincial Award)
ShitBro: Embodied Toilet Agent
Built during a 5-day sleepless sprint at AdventureX 2025 (China's largest hackathon). We created the world's first "Embodied Toilet Agent"—a highly engaging and unconventional robot. (Awards: 1st Place in Seeed Studio, 3rd Place in AgileX, 3rd Place in D-Robotics)
Visual Servoing Delta Robot System
Built a full-stack servoing Delta robot from scratch. Deployed a TensorRT-quantized YOLOv7-Tiny model on Jetson Orin Nano, achieving real-time automated food sorting.
Gesture-Controlled Smart Glasses
A real-time hands-free interaction system. Trained MobileNetV2 on custom gesture datasets, reconstructed neural network modules in C++, and successfully deployed on an FPGA board using Vivado and SDK. (National Award)
🏅 Honors and Awards
- National Graduate Scholarship, Ministry of Education, China (2025) (0.2%)
- Outstanding Graduate Student & "Five-Good" Graduate Student, Zhejiang University (2026)
- National First Prize, "Gaojiao Cup" Advanced Mapping Technology and Product Information Modeling Innovation Competition (Top 3%)
- National Third Prize, National University Embedded Chip and System Design Competition (2022) (Top 10%)
- Provincial Silver & Bronze Awards, China International College Students' "Internet+" Innovation and Entrepreneurship Competition
- Provincial Third Prize, The China Graduate Electronics Design Contest (2025)
- Provincial Third Prize, National College Student Mathematics Competition
- Provincial Outstanding Graduate, Hebei Province, China
- First-class Scholarship, Yanshan University (2021, 2022, 2023)